



|
Earlier posts...
Greetings Humans
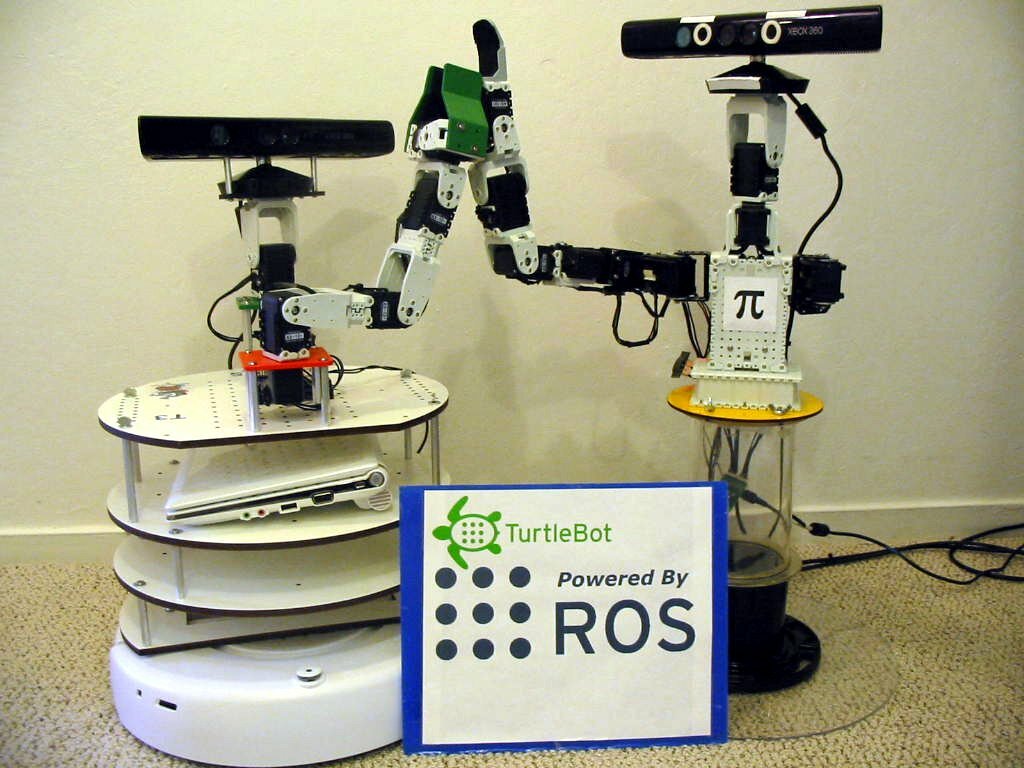
The Pi Robot project began in December 2005. The first couple of years involved testing several different body plans, microcontrollers, sensors, servos and drive motors. The next step was the development of a modular programming frame work for coordinating sensory data and motor commands into autonomous behaviors. Around the same time, Willow Garage was developing ROS, the Robot Operating System. In 2010, Pi jumped on the ROS train and has been running ROS ever since. Pi's appearance has changed over time to experiment with different software and hardware configurations. A "Turtlebot Pi" and a table top Pi with one arm appear in the photo to the left. Pi has also experimented with an omnidirectional vision system (like the one shown below).
 It would also be nice to give Pi a self-balancing wheel base, like that used on the Segway, or an omnidirectional holonomic drive system like the three-wheeled Rovio shown below. It would also be nice to give Pi a self-balancing wheel base, like that used on the Segway, or an omnidirectional holonomic drive system like the three-wheeled Rovio shown below.
 Click the links on the left to see more pictures and videos of Pi and Peppy (both then and now) as well as Rovio. For the latest postings and news, check on Pi Robot's new Wordpress site. Click the links on the left to see more pictures and videos of Pi and Peppy (both then and now) as well as Rovio. For the latest postings and news, check on Pi Robot's new Wordpress site.
Cybernetically yours,
Pi Robot
|
|
